[2 / 1 / 1]
Quoted By:
Okay, so this is a long one but I'll put a TL;DR for the people who just want to follow through with this or whatever.
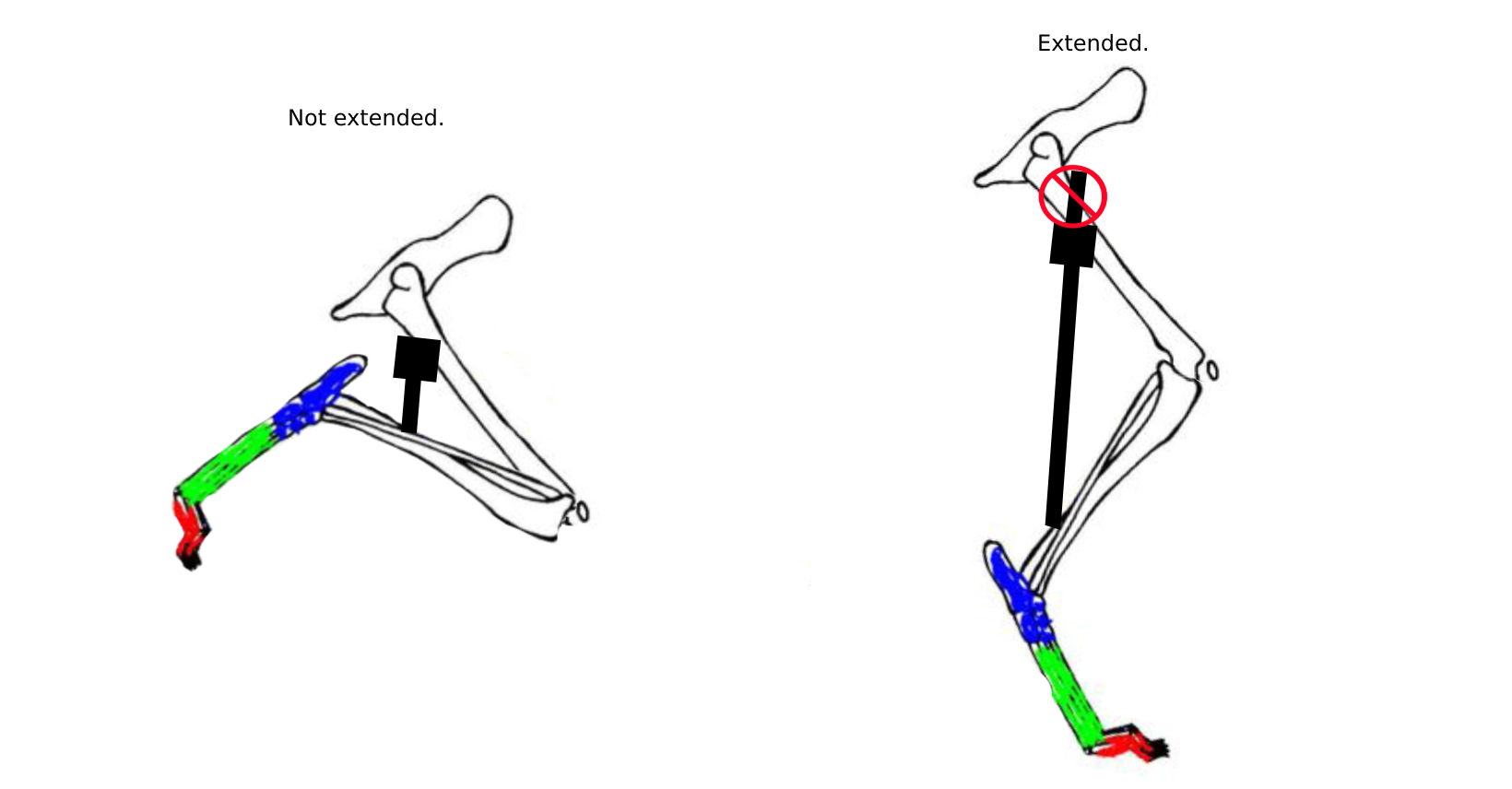
I am a very newbie type of guy to designing things like this, I am designing a bi-articular leg, like a cat's, my original plan was to use a pneumatic actuator to act like a sort of muscle to contract and control the leg sort of like how the muscle would in a cats leg, but here's the issue, I can't use air controlled mechanics in the robot because literally, everything else on the robot will be electrically powered, along with the fact that I need this robot to be somewhat cat-sized, so, obvious answer to that would use a solenoid actuator, but the issue with that is that I can't have the back of the solenoid actuator coming out because it will be obstructed by the femur (the plan was to have the solenoid actuator connected to the bottom of the femur and then connect to the fibula). I have also thought about using a servo but I need the cat to have a outer metal shell that looks realistic and not some deformed cat Any ideas for this? Will I need to design my own thing for it to replicate the muscle of the cat's leg? (i WILL have more questions so, stay tuned) PLEASE ENLIGHTEN ME IF MY DIAGRAM IS WRONG I LITERALLY HAVE NO CLUE HOW THIS STUFF WORKS.
TL;DR: Designing a bi-articular leg like a cat's, but can't use pneumatic actuators due to electrical constraints. Considering solenoid actuators, but they're obstructed by the femur. Need a solution for realistic movement without obstructing the leg's structure.
I am a very newbie type of guy to designing things like this, I am designing a bi-articular leg, like a cat's, my original plan was to use a pneumatic actuator to act like a sort of muscle to contract and control the leg sort of like how the muscle would in a cats leg, but here's the issue, I can't use air controlled mechanics in the robot because literally, everything else on the robot will be electrically powered, along with the fact that I need this robot to be somewhat cat-sized, so, obvious answer to that would use a solenoid actuator, but the issue with that is that I can't have the back of the solenoid actuator coming out because it will be obstructed by the femur (the plan was to have the solenoid actuator connected to the bottom of the femur and then connect to the fibula). I have also thought about using a servo but I need the cat to have a outer metal shell that looks realistic and not some deformed cat Any ideas for this? Will I need to design my own thing for it to replicate the muscle of the cat's leg? (i WILL have more questions so, stay tuned) PLEASE ENLIGHTEN ME IF MY DIAGRAM IS WRONG I LITERALLY HAVE NO CLUE HOW THIS STUFF WORKS.
TL;DR: Designing a bi-articular leg like a cat's, but can't use pneumatic actuators due to electrical constraints. Considering solenoid actuators, but they're obstructed by the femur. Need a solution for realistic movement without obstructing the leg's structure.
